Led by professor Joydeep Biswas, AMRL performs research in robotics to continually make robots more autonomous, accurate and robust in unstructured environments
Do you need a dense map to localize your robot over long-term deployments? We don’t think so!
Want to know how? If you're at #IROS2024, come checkout my presentation on "ObVi-SLAM: Long-Term Object-Visual SLAM" at 10:15 (October 17) in Room 1.
I am thrilled to announce that UT CODa has been accepted at #IeeeTro24! Thank you to all of my collaborators at @Joydeepb_robots@amrl_ut who helped make this work possible. We are also excited to share the release of CODa version 2. More on CODa v2 in this🧵
Thrilled to share one of our projects at #NVIDIA this Summer - enabling long-horizon open-world perception and recall for mobile robots!
Fantastic work by @_abraranwar over his internship, jointly with Yan Chang, John Welsh, and @SohaPouya
https://t.co/nQn3iywCEz
Introducing STERLING 💫: "Self-Supervised Terrain Representation Learning from Unconstrained Robot Experience" 💫 to be presented at CoRL 2023 in Atlanta! 😀
Project Page 🌎: https://t.co/TtNbgZTnjR
Paper 🗞️: https://t.co/12YxBOnFVG
A thread 🧵
Interested in urban-scale autonomous mobile robots? UT CODa is for you!
1.3M 3D BB annotations
53 object classes
204 M annotated points w/ 24 terrain classes
Globally consistent poses
Pre-trained models for 16, 32, 64, 128-channel LIDAR
https://t.co/yeZ3Uke4BE
Context-aware navigation requires object/terrain-level understanding - in support of this, we are thrilled to release CODa, the largest multi-class, multi-modal urban robotics dataset to date.
https://t.co/z0I9giJyUQ
Work done with a fantastic team from @amrl_ut!
A short 🧵, 1/7
What do we really need for social navigation?🤖
Deep RL? No❌
Imitation learning? No❌
LLMs? No❌
📊Turns out for over 80% of the time, classical methods >> learning-based solutions!
In new work, we rethink social navigation. Thread🧶
For this year's symposium, we received 85 submissions, of which 30 were accepted to be presented in December! Congrats to all the authors!🎉
We have also release the call for extended abstracts: https://t.co/31n6XOtrwB
Deadline: Oct. 10, 2023
🚨We present🤖SocialGym 2.0, a simulator for Multi-Agent Social Robot Navigation in Shared Human Spaces !
👨💻Code:
https://t.co/yN7shmDhG3
📎Preprint:
https://t.co/12meyhixBl
📄 Docs: https://t.co/IndPaBUMIc
🧵
What's holding back service & home robotics is the last mile challenge. How can robots navigate in constrained spaces densely packed with human safely & efficiently?
We built a robot🤖that can do this safely, smoothly, & without deadlocks.
Here's how🧵
✨Excited to announce our paper,
🤖iPLAN🤖: Intent-Aware Planning in Heterogeneous Traffic via Distributed Multi-Agent Reinforcement Learning,
has been accepted for an Oral presentation at #CoRL2023@corl_conf!
🧵(1/6)
#AutonomousVehicles🚗
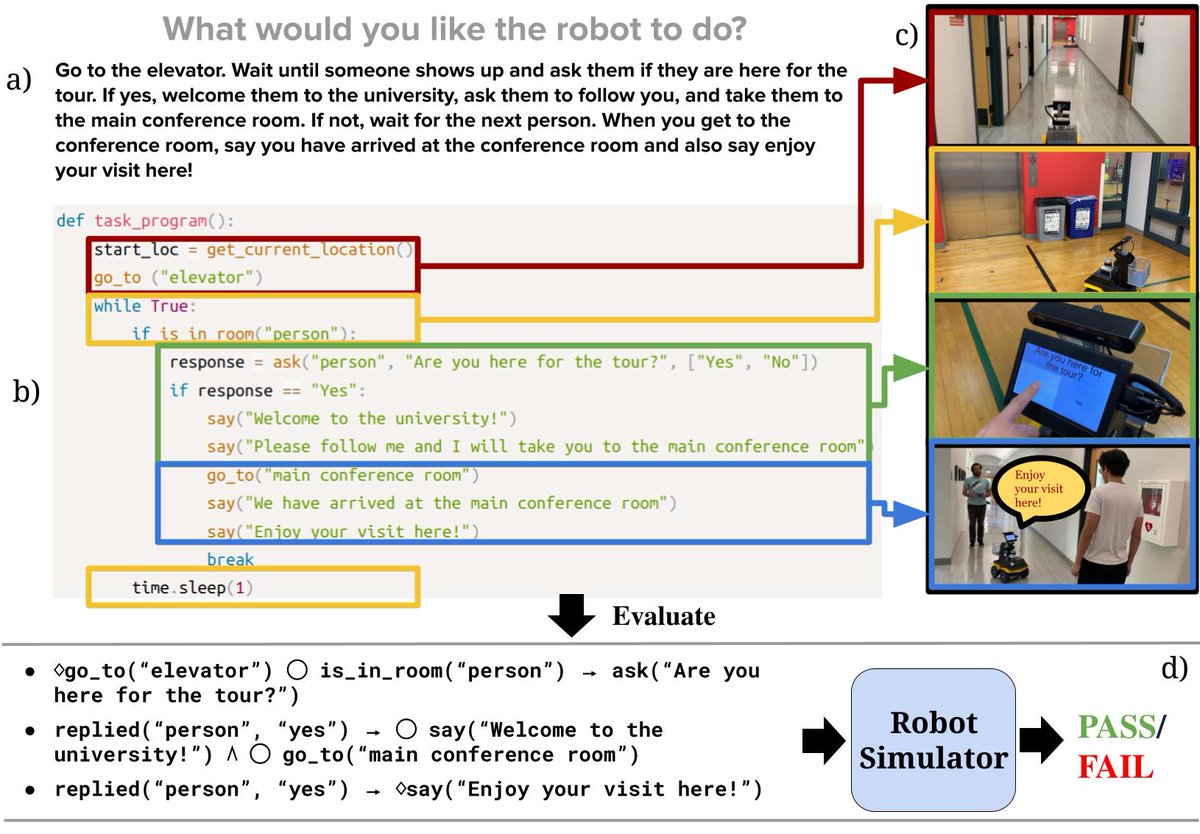
We are thrilled to release CodeBotler and RoboEval to deploy and evaluate LLMs for programming service mobile robots.
https://t.co/f74WCHtVev
Joint work with a fantastic team from @amrl_ut + @arjunguha's group at NU.
A short 🧵, 1/8
The International Symposium on Multi-Robot & Multi-Agent System will be held on December 4 -5, 2023, in-person at Boston University in Boston, MA
Website: https://t.co/yGvaWDKXhH
CfP: https://t.co/l9QiGI0Uof
Paper Submission Deadline: June, 26, 2023
The 12th Autonomous F1/10 Grand Prix will be held at CPS-IoT Week, San Antonio, TX, May 8-9. Come cheer on the autonomous racers!
Co-Organizers: @Joydeepb_robots, @XuesuXiao, Rahul Mangharam
Student Organizers: @rmeno12 , Arnav Iyer, Shakeel Samsudeen, Pranav Atreya
@f1tenth
Happy #TBT! This week's #RSSPioneers throwback features Rohan Chandra (@rohanchandra30), a 2022 RSS Pioneer.
He is a postdoctoral research fellow working at @UTAustin and a graduate of @umdcs.
Find out more about him in our 🧵👇!