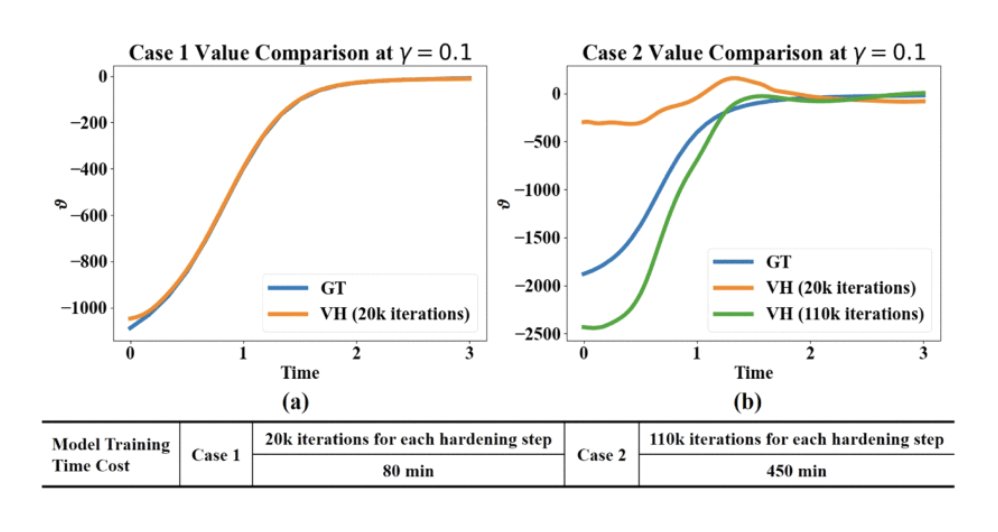
Researchers from @ASUEngineering develop a new algorithm for human robot interaction that relies upon efficiently solving complex partial differential equations using a novel hybrid learning approach.
https://t.co/ybRgFzROrT
#NeuralNetworks#HumanRobotInteraction#robots
Robots can infer rewards from human feedback, but what about safety boundaries? Our work, Safe MPC Alignment (https://t.co/2QjGHRyYj2), led by @ZhixianXie_ASU, collab’d with @asuriselab, Yi Ren, @zhaoran_wang, and @pappasg69, shows it’s possible and can be human-data efficient!
Our full-day workshop on Bio-inspired Soft Aerial Robotics will start at 8 am tomorrow in Room Encore 2. We look forward to seeing you there!
https://t.co/kJybnZzlLa
🚀 Join us tomorrow (Apr, 14) at RoboSoft in San Diego for the Bio-inspired Soft Aerial workshop! Explore groundbreaking aerial robotics with us. Don't miss out! 🤖✈️ #RoboSoft2024#Robotics#Workshop
We are at @ieeeiros! My student Weijia Tao will present WHOPPEr Drone, which uses its compliant body to perch and transport objects (TuAT4, 140D). I will present our work with @spring_berman's team on configuration tracking control of soft robotic arm (MoAT6, 140FG)! #IROS2023
Our fun work on Soft-Bodied Drones for collision resilence and perching was also selected for this issue's cover on @SoftRobotics_JN. Please find the paper here: https://t.co/sSvUPPO8oL
Excited to announce my student Emiliano Quiñones Yumbla has successfully defended his PhD dissertation on sensing, control, and testing of wearable soft robot! He will join @UPRCA_Informa as a tenure-track faculty member. Congrats and good luck to your new chapter as a professor!
Recent research proposes and develops a lightweight, inflatable, soft-bodied aerial robot that can pneumatically vary its body stiffness to achieve intrinsic collision resilience. #softrobotics
https://t.co/aDzZJb1A1o
An inflatable drone can perch on a wide variety of objects by colliding with them – taking advantage of its soft-body physics to increase its contact time with the landing zone without bouncing off
Learn more: https://t.co/SlsFgo6BPn
Excited to share our new work on SoBAR (Soft-Bodied Aerial Robot)! The robot uses fabric-based inflatable frame with tunable stiffness for collision resilience and perching. This work was published @SoftRobotics_JN.
Paper: https://t.co/69lG8QNkeq
Videos: https://t.co/nRwJKw9osM
Congratulations @patnaiKarishma for delivering a wonderful dissertation talk! Thank you all for joining in person and online. Karishma made excellent contributions to design, control, and planning of morphing and collision-resilient drones. She is #6 PhD graduate from our lab!
This work is led by my students Mostafa Rezayat and Mason Smith. Special thanks to our collaborator at Barrow Neurological Institute and @NSF for the support!
Check out our paper “Learning Post-Stroke Gait Training Strategies by Modeling Patient-Therapist Interaction" published in IEEE T-NSRE! We aimed to achieve effective robot-aided gait training by incorporating the expertise of therapists in stroke rehab. https://t.co/3m4uZ1nRA3
We custom designed a wearable sensing system to measure lower-limb kinematics of patients and assistive force applied by therapists. This data is used to directly learn a virtual impedance model that captures therapist's assistive strategies and predicts their assistive torque.
This work highlights the needs to co-design planner and controller for morphing robots. We validate the proposed algorithms by simulating a foldable quadrotor’s flight through a passageway. Paper: https://t.co/xQVGqG1uqM. We will also present this work @ACC_Control. Check it out!
New paper alert! Led by @patnaiKarishma, our work on adaptive attitude control for foldable quadrotors is published @CSSIEEE L-CSS! We employed switched systems theory to find switching conditions between different configurations and integrate them into a trajectory planner.