Check out Ariticraft 🦾 - a highly efficient agentic system that generates articulated 3D assets fully automatically at scale!
🚀 https://t.co/anSM87Li49
GEN-1 delicately arranges potato chips, and lifts a heavy bag of potatoes — from a gentle touch to a strong grip.
Read more about Gen-1 in our blog posts in the comments below ↓
We are working to restore mobility that was lost due to disease or spinal cord injury by allowing participants to control robotic arms with their thoughts.
See how this is possible.
Teaching robots to perform dexterous manipulation tasks currently requires teleoperation, which limits demonstration quality, speed, and scalability. Instead, why not use human videos? The problem is that a human hand isn’t a robot hand, so data must be retargeted using simulation to resolve issues like collisions and interpenetration when controlling the hand.
In VideoManip, @chen_hongyi_ and co-authors built a system to solve this problem, taking in RGB videos of humans performing manipulation tasks and using them to create accurate simulations with which to learn robot policies.
Watch episode #73 of RoboPapers, hosted by @micoolcho and @chris_j_paxton, now to learn more!
The Jensen Huang episode.
0:00:00 – Is Nvidia’s biggest moat its grip on scarce supply chains?
0:16:25 – Will TPUs break Nvidia’s hold on AI compute?
0:41:06 – Why doesn’t Nvidia become a hyperscaler?
0:57:36 – Should we be selling AI chips to China?
1:35:06 – Why doesn’t Nvidia make multiple different chip architectures?
Look up Dwarkesh Podcast on YouTube, Apple Podcasts, Spotify, etc. Enjoy!
GEN-1 still works with lights off, and generalizes under harsh lighting conditions.
The model uses raw video pixels to make decisions, so strong lighting changes can drastically alter its input distribution. Yet performance still holds.
Why? GEN-1 was pre-trained on a massive, diverse dataset of different lighting conditions—everywhere from outdoor farms, to warehouses, from grocery stores, to dimly lit homes—it's already seen it all, and transfers this knowledge to new tasks.
This is a glimpse of what we call Mastery, and is part of the reason these models can cross a new performance threshold.
Read more about it in our blog post in the comments below 👇
Skild showed something similar last year but with quadrupeds.
Skild brain, trained on 100,000 diverse simulated robot types enabled remarkable real-time adaptability.
In-context adaptation allows the brain to discern the robot form and adapt to extreme changes in its body.
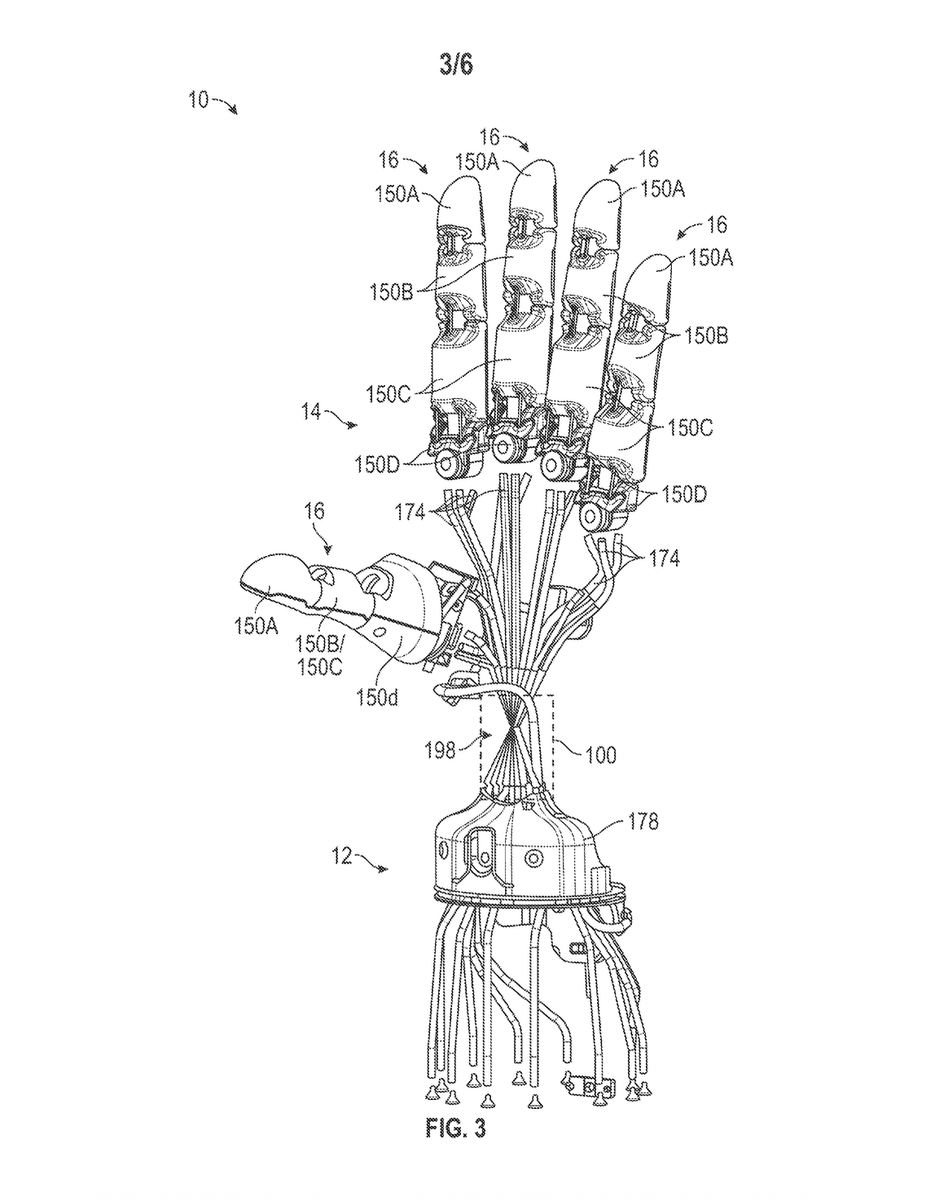
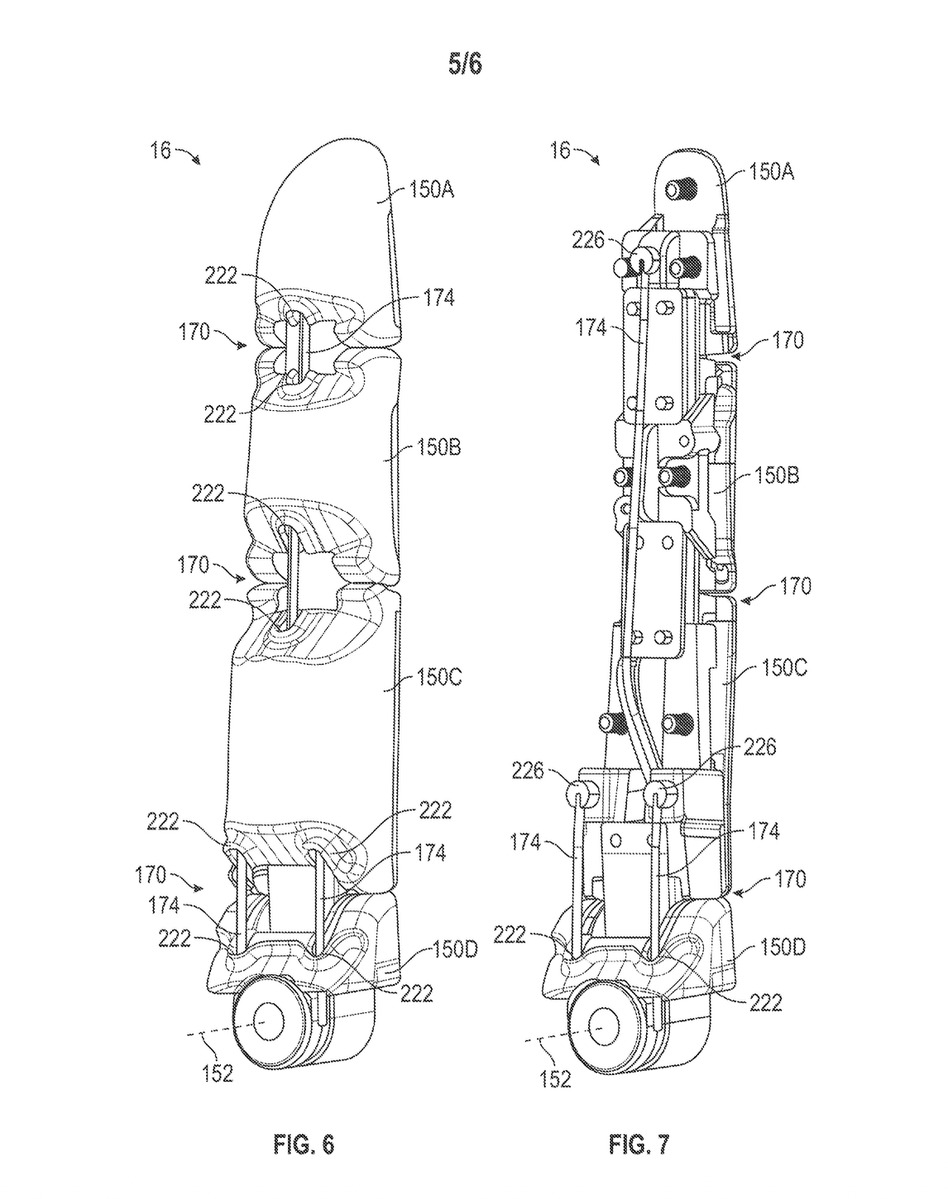
Tesla's Optimus V3 robot hand looks to have been revealed in a new international patent published today.
The patent describes a tendon/cable-driven hand:
• Actuators in the forearm
• Each finger has 4 degrees of freedom
• The wrist has 2 degrees of freedom
• Tendon-driven system: 3 thin, flexible control cables (tendons) per finger run from forearm actuators, through the wrist and into the fingers.
• Advanced wrist routing: Cables switch from a lateral (horizontal) stack on the forearm side to a vertical stack on the hand side, plus a transition zone to minimize stretch, torque, friction, and crosstalk during yaw/pitch movements.
• Integrated control cable channels in the finger segments and precise routing (behind some joints, forward others) for selective bending.
The full filing is in the thread below if you want to read more about it: