How can a robot provide details of plant anatomy for plant phenotyping? Today @IROS2025 , we present Botany-Bot from @berkeley_ai@Siemens.
Botany-Bot 1) creates segmented 3D models of plants using Gaussian splats and GarField 2) uses a robot arm to expose hidden details. (1/9)
Join us this week at #ICRA2026 on Community Building Day for the Robotics in Africa Forum.
Date: Thursday, June 4
Time: 10:00am-12:00pm
Location: Schubert 2 at the VIECON (First Floor), Vienna
https://t.co/E690HsqmG9
Join us this week at #ICRA2026 on Community Building Day for the Robotics in Africa Forum.
Date: Thursday, June 4
Time: 10:00am-12:00pm
Location: Schubert 2 at the VIECON (First Floor), Vienna
https://t.co/E690HsqmG9
The Summer ’26 issue of Berkeley Engineer magazine is here!
Our cover story centers on how Professor @Ken_Goldberg is redefining robot manipulation with creativity and code.
Read the issue: https://t.co/gHAuv9Qn7v
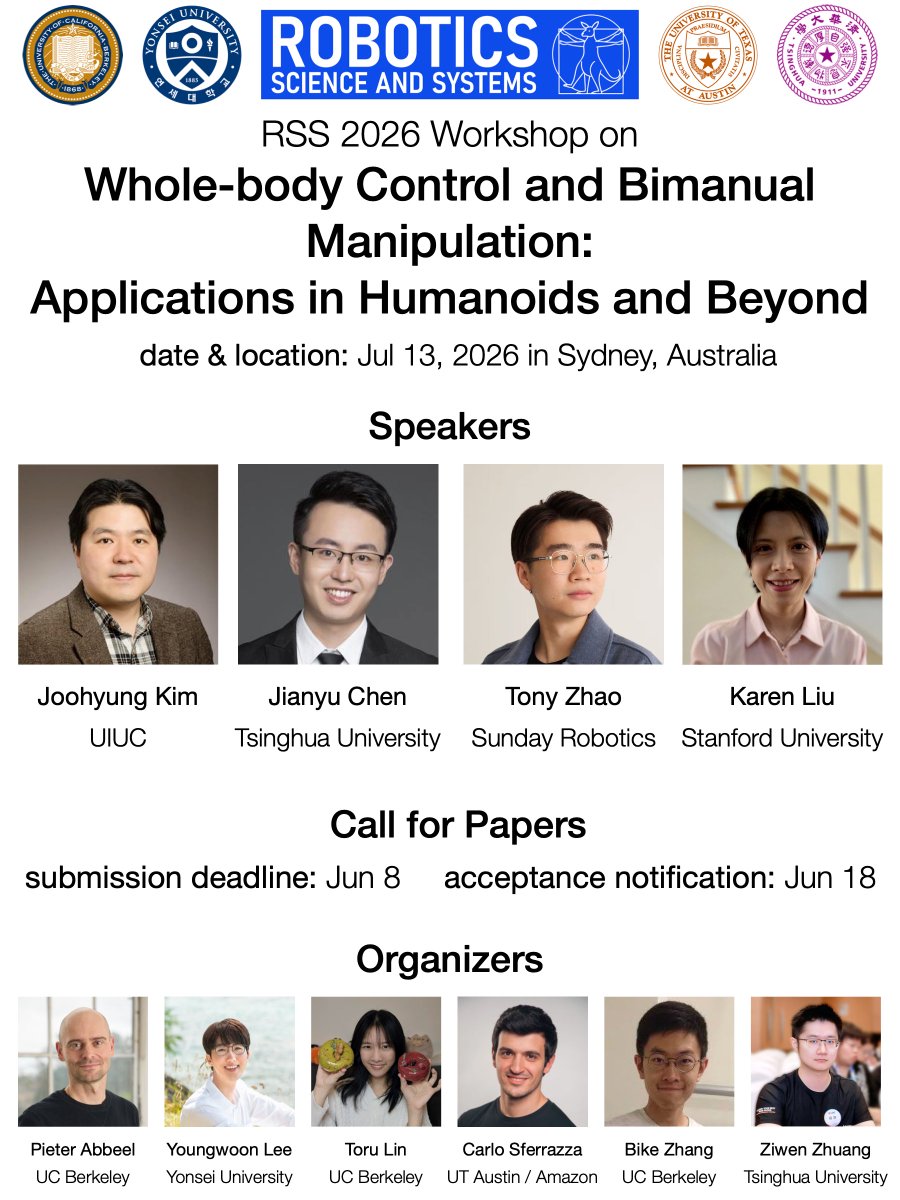
#RSS2026 Call for Papers ✨
Workshop on Whole-Body Control & Bimanual Manipulation: Applications in Humanoids & Beyond
Share your latest work by Jun 8 &
Join us with our amazing lineup of speakers from academia & industry!
https://t.co/b4IJHK2hFb
@RoboticsSciSys
We are VERY excited to announce the call for applications has just been released for the 5th CV4Ecology Short Course!! This intensive program trains ecologists and conservation practitioners to develop their own AI tools for their own data. Tell your friends!
(link below)
@kevin_zakka@pabbeel Congratulations @kevin_zakka
I really enjoyed listening to your talk and the breadth of your work! All the very best with your next steps.
Robotics: coding agents’ next frontier.
So how good are they?
We introduce CaP-X: an open-source framework and benchmark for coding agents, where they write code for robot perception and control, execute it on sim and real robots, observe the outcomes, and iteratively improve code reliability.
From @NVIDIA@Berkeley_AI@CMU_Robotics@StanfordAILab
https://t.co/MVcc6XWQhY
🧵
Action. Wonder. Adventure. Artemis II has got it all. Don't miss the moment. Our crewed Moon mission will launch as early as April 1.
Learn how to watch: https://t.co/fAg0bGAqEc
When people share a space, their movements become intertwined. Embodied agents need to understand these social dynamics to interact effectively.
Introducing MAGNet 🧲, a unified autoregressive diffusion forcing model for multi-agent motion generation that captures these interactions.
MAGNet is flexible: predict the future, fill in missing motion, or have people react to each other, all while naturally scaling to N>2 people and generating ultra-long motion sequences.
Really excited to release mjviser, a web-based MuJoCo viewer, powered by Viser. It has almost all the features of the native MuJoCo viewer, but runs in your browser. Load and simulate any MuJoCo model with a single uv command 👇
uvx mjviser <model.xml>
Humans can see in high-res, high-FPS in real-time. Why can't VLMs?
Introducing AutoGaze: ViTs/VLMs "gaze" only at key video regions! Up to 4-100x token savings, 19x speedup, and enables scaling to 4K-res 1K-frame videos.
📄 https://t.co/GhbWZwMAg7
🌐 https://t.co/mEJ991MAIR
🤗 https://t.co/FOfc2QRThi
(1/n)🧵
Big news🎉: The Deep Learning Indaba 2025 Research Track proceedings are officially LIVE!
We are excited to announce that the research presented at #DLI2025, is now published in the Proceedings of Machine Learning Research (PMLR), Volume 302.
A huge congratulations to all the authors, reviewers, and organisers whose work made this possible. This is an important milestone in showcasing and advancing African-led research in machine learning.
Read the full proceedings here: https://t.co/nZ3fNgANbN
#DLI2025 #ResearchTrack
The viser viewer in mjlab just got a huge QOL upgrade!
- Real-time factor control: go slower or faster than real-time and viewer paces physics to match
- Single step mode: advance one physics step at a time (super useful for debugging!)
- Overall faster and smoother
@brenthyi who worked on FPO/FPO++ is finishing his PhD and going on the job market 😭✨
He is also the person behind viser, pyroki, egoallo, jaxls, tyro and more!
I can't express how amazing it is to have Brent on your team..! Any team would be incredibly lucky to have him!!
🪘 Call for African Datasets 🪘
We are delighted to announce the call for the African Datasets as part of the Research in Africa Days at Deep Learning Indaba 2026 in Nigeria. Data is the heartbeat of innovation, and we are expanding the African Dataset Repository to ensure African realities power the global AI revolution.
We invite startups, researchers, individuals, and organisations to submit datasets that reflect the diverse challenges and opportunities of the continent.
Why Join the Mission?
✨Visibility: Selected datasets will be featured during the Research in Africa Days.
✨Impact: Help make African data the foundation for innovations that transform lives and build a brighter future.
✨Representation: Selected teams will designate a representative to attend the Indaba in Nigeria and represent their work.
Deadline: 20 March 2026.
Submit Here:👉 https://t.co/YOcnRLka5t
#DLI2026 #Indaba2026
tl;dr New planner for world models! GRASP: gradient-based, stochastic, parallelized.
Long range planning for world models has always been an issue. 0th order methods like CEM/MPPI dominate, but have degrading performance at longer contexts or higher-dimensional actions. We wanted to address this from the ground up.
w/ Michael Rabbat, @ask1729 , @ylecun*, @_amirbar* (equally advised)
Glad to have been a part of this.
Use AugE-Toolkit to scale up your robot embodimet augmentation.
Use OXE-AugE to train new policies and extend existing policies to new embodiments.
Can robot data evolve with robot hardware? Robot arms and hands are rapidly evolving based on advances in materials, motors, sensors, mechanical designs, and applications. Now, demo data can also evolve:
AugE-Toolkit is a new open-source, easy-to-use, scalable package for augmenting robot embodiments: it converts demo data from one robot arm/gripper to a different robot arm/gripper in a scalable way.
We used AugE-Toolkit to create OXE-AugE––a large open-source dataset that augments 16 popular OXE subsets with 9 different robot embodiments to provide over 2M new trajectories, tripling the size of the original dataset. The OXE-AugE dataset is on HuggingFace and you can download and train right away!
Most importantly, we find robot augmentation scales!
🌐 https://t.co/K3ht3jxCDl
🤗 https://t.co/JhyPDXllFW
🔗https://t.co/hUe8I42Nrf
🧵👇 (1/9)