We obsess over camera-space skeletons, ignoring world-space physics.
That's why many humanoid policies fail in reality.
OmniRetarget is a major milestone for physically valid data generation.
Congrats to @zhenkirito123, @LujieYang0 , @pabbeel , and @carlo_sferrazza
It preserves robot-object-terrain contacts via an interaction mesh.
Eliminating foot-skating and penetration while turning one demo into a dataset.
But there's a very different path: no human demos at all.
MotionDisco uses LLM-guided evolutionary search and trajectory optimization to discover kinodynamics from scratch.
Two opposite data engines solving the same Unitree G1 task.
Which approach wins?
Humans don’t explore blindly.
When entering a new environment, we use prior experience to infer what might lie beyond what we can see and plan ahead.
What if robots could do the same?
Introducing MAGICIAN, our #CVPR2026 Oral paper on long-term planning for active mapping
People often talk about “world models” as if everyone means the same thing. In reality, some of the biggest names in AI are betting on very different paths.
@ylecun ‘s camp believes the future is about learning abstract representations of the world, not generating every pixel. The idea is simple: humans don’t think in pixels, we think in concepts. A world model should reason in a compressed latent space, then only render details when needed. The upside is efficiency and potentially stronger planning. The downside is that it’s harder to verify whether the model’s internal understanding actually matches reality.
@DrJimFan and @nvidia are taking almost the opposite approach. Their bet is that if a model can predict what happens next in video, it will eventually learn physics and causality. Think of it as turning generative video into a giant simulator. The advantage is that the training signal is abundant and measurable. The challenge is cost. Predicting the world frame-by-frame is expensive, and there is a risk of building an incredibly realistic simulator that still lacks deeper abstraction.
@drfeifei sits somewhere in the middle. Her view is that simulation is the bridge, but geometry and physical structure must be explicit and checkable. The goal is to unify planning, rendering, and simulation into one system. It may be less elegant than pure latent reasoning and less scalable than pure video prediction, but it is arguably the easiest path to trust and verification.
My guess? We’ll probably end up with a hybrid. Latent models for high-level planning, simulation models for testing outcomes, and explicit geometric representations for grounding and verification.
We've made a breakthrough in self-evolving AI scientists moving from "search" to "principled discovery": Scientific discovery requires that the search space itself changes, and an AI scientist must perceive this shift without intervention. We built an AI that achieves this for the first time with the ability to discover the scientific vocabulary it reasons in. Evidence, tools, artifacts, verifiers, failures & claims become typed provenance. We show three distinct modalities: 1) retrieval, adding known objects; 2) search, exploring a fixed schema; and critically: 3) discovery, a verified regime transition.
We solve the open-endedness evaluation problem by lifting agentic workflows into a typed copresheaf and proving, via a Kan obstruction, that true discovery is not unbounded generation but a verifiable schema expansion: old evidence is transported by Left Kan extension, and genuine novelty is mathematically quantified by the pointwise residual beyond the transported image - separating discovery from mere search and making novelty objective and measurable rather than a subjective judgment or benchmark delta.
Our AI scientist is built in a way that does not pre-conceive the approach it chooses; instead, we endow the system with formal power to adapt, evolve, and reason from first principles. Case studies include:
1⃣Builder/Breaker model that discovers mode-conditioned compliance in proteins;
2⃣CategoryScienceClaw that finds anisotropic fiber-network stiffness rules.
Great work in collaboration with my graduate student @fwang108_@MITdeptofBE
F.Y. Wang & M.J. Buehler, Self-Revising Discovery Systems for Science: A Categorical Framework for Agentic Artificial Intelligence, arXiv:2606.01444, 2026
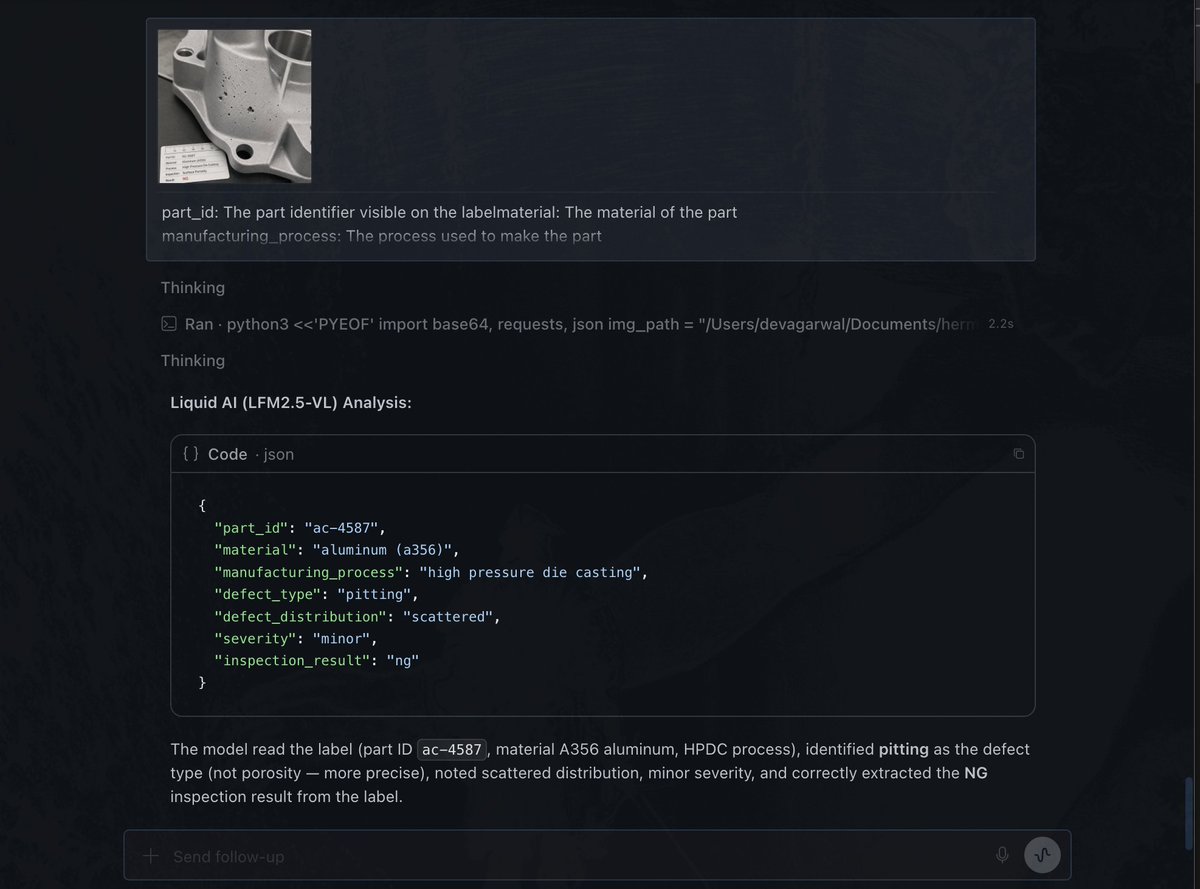
Spent some time testing LFM2.5-VL-1.6B-Extract-Q5_K_M.gguf by @liquidai .
I threw a manufacturing defect report and a chest X ray at it.
It correctly identified the material, manufacturing process, defect type, and NG result from the industrial part.
On the X-ray, it picked up the view type, clear lungs, normal cardiac silhouette, and sharp costophrenic angles.
Clean JSON output throughout.
Pretty impressive for a 1.6B model running entirely locally.
Why does Claude run out before you finish anything?
Most people burn through their whole week by midweek and blame the cap. They upgrade plans, ration their messages, switch models - and still hit the wall. Because the real reason Claude runs out so fast isn't the limit, it is
the chat you refuse to close
AGIBOT WORLD CHALLENGE @ ICRA 2026 caught my attention because I have recently been studying AGI, and I am still actively researching it.
Embodied AI brings a key question into the physical world: so how do we evaluate intelligence when it must understand, plan, adapt, and act?
In abstract environments, intelligence can be measured through reasoning, language, and prediction.
In robotics, the evaluation becomes more demanding because the system must operate under physical constraints, deal with uncertainty, and turn decisions into reliable action.
This is why AGIBOT WORLD CHALLENGE @ ICRA 2026 is interesting from a technological perspective.
The initiative brings together global research and industry teams around two important dimensions of Embodied AI: Reasoning to Action and World Model.
For me, the most relevant point is the move from simulation-centered evaluation to real-robot validation, with physical tasks, standardized benchmarks, and AGIBOT G2 humanoid robots used in real-world scenarios.
This matters because the future of Embodied AI will depend less on isolated demos and more on measurable progress in stability, adaptability, long-horizon task execution, and deployability.
AGIBOT deserves attention here because it is contributing to a more practical evaluation framework for robotics, where intelligence is assessed through what a system can understand, predict, and do in the physical world.
In partnership with AGIBOT for AGIBOT WORLD CHALLENGE @ ICRA 2026
#AGIBOT #AGIBOTWORLDCHALLENGE #EmbodiedAI #Robotics #ICRA2026 #HumanoidRobots #ArtificialIntelligence
Boston Dynamics taught Atlas a Rabona kick.
Learned from human mocap, retargeted to Atlas, trained in sim via RL, deployed zero-shot to the real robot.
Soccer skills demand whole-body coordination, and similar recipe transfers to warehouse work.
Anthropic engineer just said something 99% of people scrolled straight past
> You’re not supposed to prompt Claude
> You’re supposed to build a system that prompts itself
She broke down exactly how Anthropic’s own engineers use Claude internally:
→ the daily workflows they automated first
→ the task pipelines Cowork can run that most users don’t even know exist
→ and the scheduling system that quietly handles all the busywork while you do real workIf you’ve been using
Claude for more than a month and you’ve never left the chat window
You’re still running one agent
when you could be running an entire team
Opening Claude and typing one prompt at a time?
That’s the 2024 way of doing things
2026 looks completely different
Who’s already switched from chat to system? Drop it in the comments
It’s a #machining kind of morning - and a quick glance at how the job’s coming along. 👌
With 16 Star #slidinghead machines across our three sites, we have the capacity to machine precision components from Ø𝟬.𝟯𝗺𝗺 - 𝟰𝟮.𝟬𝗺𝗺 with consistency and efficiency.
#BTMAUK
As I’ve been saying for a while, we’re already in the optimization phase of GenAI.
The gap between models still matters, especially at the frontier, but for most companies that’s no longer the main challenge. The bigger question is how to actually make GenAI and agentic initiatives work in the real world.
In my view, the biggest bottleneck isn’t the model. It’s who owns the integration and whether the organization is willing to rethink its workflows.
A lot of companies are trying to bolt AI onto existing processes, teams, approval chains, and ways of working. That usually creates friction everywhere. The real opportunity comes when you redesign the workflow around what these systems can do, instead of forcing them into structures designed for humans.
That’s one of the reasons we’re seeing such a boom in forward-deployed engineers. Their job isn’t just deploying models. They’re helping redesign how work gets done.
At the same time, most use cases don’t need frontier models. Many coding, support, automation, research, and internal productivity workflows can run perfectly well on much cheaper models. Even Claude Code can be paired with models like Kimi or DeepSeek for a large number of tasks, turning what could have been a massive AI bill into something surprisingly affordable.
Frontier models, or more accurately frontier systems and harnesses, are still incredibly valuable. They’re just better suited for the harder problems: high-risk decisions, complex reasoning, critical workflows, and situations where reliability matters more than cost.
The discussion is slowly moving from “What’s the best model?” to “What’s the best way to build around these models?”. Personally, I think the second question is where most of the value will be created over the next few years.
Hermes Agent. Zero to a self-improving AI employee. One complete build.
Installation. Models. Memory. Dashboard. Cron. Multi-agent.
Works while you sleep.
The people who set this up this weekend will never manually run a content, research, or business workflow again.
The compounding starts from the first automated task that runs.
Read this and bookmark it now 👇
Pilz defiende su visión de la seguridad industrial del futuro en Nexus Valencia 2026 presentando sus últimas novedades en tecnología IO-Link Safety y en sistemas de gestión de identidad y accesos (I.A.M.)
Artículo ☑️ https://t.co/wEAw6ZjmDe
#Robótica#Automatización#Industria40
¡Notición!
NVIDIA crea un robot humanoide Open Source para investigación en robótica.
El robot NVIDIA Isaac GR00T combina:
- Cuerpo del robot humanoide Unitree H2
- Manos de Sharpa para destreza manual
- Cómputo integrado Jetson Thor
- Software y modelos abiertos Isaac GR00T
THIS DEVELOPER SPENT $0 ON CLAUDE CODE TOKENS TODAY AND HEADROOM SAVED 3,376,624 OF THEM WHILE HE WAS CODING
he opened claude code before lunch, gave it the task and went back to scrolling his feed
by end of day the feature was shipped, tested and committed to main
his coworkers are still hitting context limits and paying full price for every mcp call and web search
the only thing separating them is one pip install
every sub-agent spin-up kills your prefix cache and doubles the bill, headroom compresses the context 75% before anthropic even sees the request