Today we brought our VERO robot to the Genova Smart Week 2024! This event was a great opportunity to showcase how VERO can contribute to a more efficient and sustainable future for cities.
#VERO#Robotics#SmartCity#GenovaSmartWeek
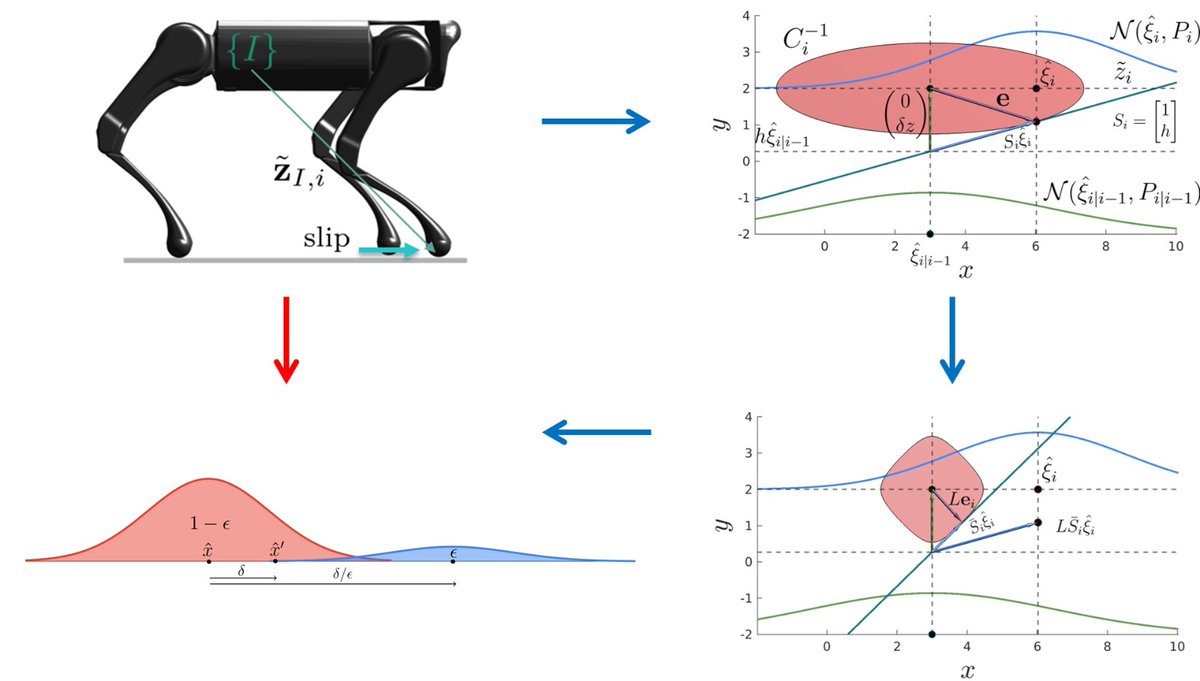
Our visiting PhD student, Hilton Marques Santana, is presenting this work today Saturday 23/11 at the IEEE RAS HUMANOIDS Conference during Interactive Session 1 (Foyer 850) from 10:30 to 11:30. Read more about the research: https://t.co/9GgFZ8Vc1B
Our latest research introduces a robust Invariant Extended Kalman Filter that uses proprioceptive sensors and robust cost functions to minimize the impact of slippage and outlier measurements. 🚀
Results: Reduced pose drift by up to 40% over 450m compared to current methods!
Exploiting morphological symmetries can enhance model-free RL sample efficiency, policy optimality, and sim2real transfer in legged locomotion and manipulation. Our #IROS2024 paper exploits these symmetries for RL methods. Code is open-sourced: 🌐 https://t.co/1I2TMl0sfW🧵
Human-robot and robot-robot collaborative carrying with mobile robots typically requires a manipulator arm. At #IROS24, we introduce PACC, a novel passive-arm design that, coupled with a decentralized MPC, allows an efficient execution of such tasks with quadruped robots.
Model Predictive Control (MPC) for legged robots is limited by model complexity. In our #IROS24 paper, we show how partitioning the robot into smaller subsystems, each controlled in parallel by a faster dedicated MPC, can achieve complex whole-body motions more efficiently.
Sampling-based methods are attractive due to the incredible simplicity of their implementation. At #IROS24, we present our work where we use GPU acceleration in #JAX to jointly optimize for gait parameters and ground reaction forces using more than 10K rollouts in less than 2ms
We are hiring:
1 Technical Project Manager for Space Robotics and Teleoperation and
1 Software Engineer for Loco-Manipulation on Quadruped Robots
📧 For more info and to apply, visit:
https://t.co/eeuZUEcSFb
📅 Deadline: Open until filled
#JobOpening#ProjectManager
VERO is a unique robot dog that integrates locomotion and cleaning abilities, allowing it to vacuum autonomously while walking. The project highlights the versatility of legged robots in multi-functional tasks.
Stay tuned for more updates, and let us know what you think! 💡
We are super happy that our latest research project, VERO, has been featured in the IEEE Spectrum Magazine (which is sent to over 400'000 IEEE members worldwide) under the article titled "Robot Dog Vacuums With Its Feet"
https://t.co/rZyZDpoKQC
#VERO#RobotDog#GreenRobotics
VERO, a legged robot by Dynamic Legged Systems Lab, cleans hard-to-reach areas, like beaches and parks, using foot-mounted vacuum nozzles to efficiently remove cigarette butts from challenging terrains.
YouTube / @DynamicLeggedSystemslab
🚀 VERO is out on @IEEESpectrum !
https://t.co/6n2phgsUFh
VERO is a Vacuum-cleaner Equipped RObot that can assist people in cleaning beaches, small alleys, and parks, particularly for removing cigarette butts, in terrains hard to reach for wheeled and tracked
robots.
For more technical details, read our latest publication in the Journal of Field Robotics (https://t.co/6rNjUdLh2m).
Thanks to the authors Lorenzo Amatucci, Giulio Turrisi, Angelo Bratta, Victor Barasuol, Claudio Semini.
Further information:
https://t.co/TUd67beoxc
Excited to present our work at #L4DC: "Dynamics Harmonic Analysis of Robotic Systems: Application in Data-Driven Koopman Modelling".
Join us at our poster session on Wed at 16:15!
🔗 Website and code: https://t.co/1IF8ZIYhXv📷 Paper: https://t.co/AzQa39anT9
"The DLS lab presents at the 21st Int. Conf. on Ubiquitous Robots (UR2024) with 2 papers:
Paper 1: Abati et al. “Panoptic-SLAM: Visual SLAM in Dynamic Environments”.
Paper 2: Bratta et al. “ContactNet: Online Multi-Contact Planning for Acyclic Legged Robot Locomotion”.