Has visual fidelity outpaced dynamic fidelity in tactile simulation for sim-to-real transfer of policies?
Introducing HydroShear 🏄♂️ : a hydroelastic tactile shear simulation for training zero-shot sim-to-real tactile policies in contact-rich tasks where fingertip force and shear matter most!
Webpage: https://t.co/sNRtJIZjy7
Robot videos in 1x 🧵👇
Introducing Cosmos 3: Our latest frontier model for Physical AI
Cosmos 3 is the world’s first fully open omnimodel with native vision reasoning, world and action generation.
Today we’re releasing Super (32B) and Nano (8B) variants.
Has visual fidelity outpaced dynamic fidelity in tactile simulation for sim-to-real transfer of policies?
Introducing HydroShear 🏄♂️ : a hydroelastic tactile shear simulation for training zero-shot sim-to-real tactile policies in contact-rich tasks where fingertip force and shear matter most!
Webpage: https://t.co/sNRtJIZjy7
Robot videos in 1x 🧵👇
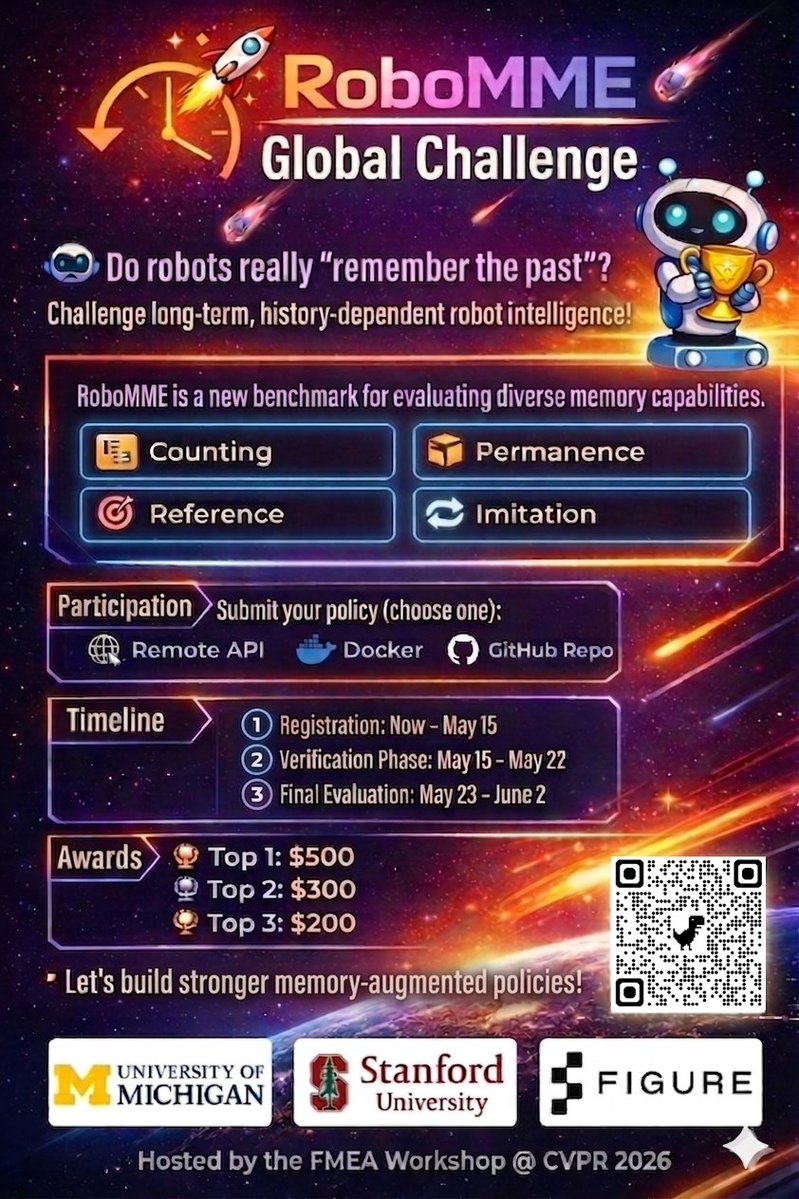
🚀 The RoboMME Challenge @ CVPR 2026 is now LIVE!
Timeline:
• May 15 — Policy submission
• June 3 — Winner announcement
🏆 Top 3 teams will be awarded $500/300/200
Let’s push the frontier for memory-augmented robotic manipulation together 💪
🔗https://t.co/79FpVd1ti3
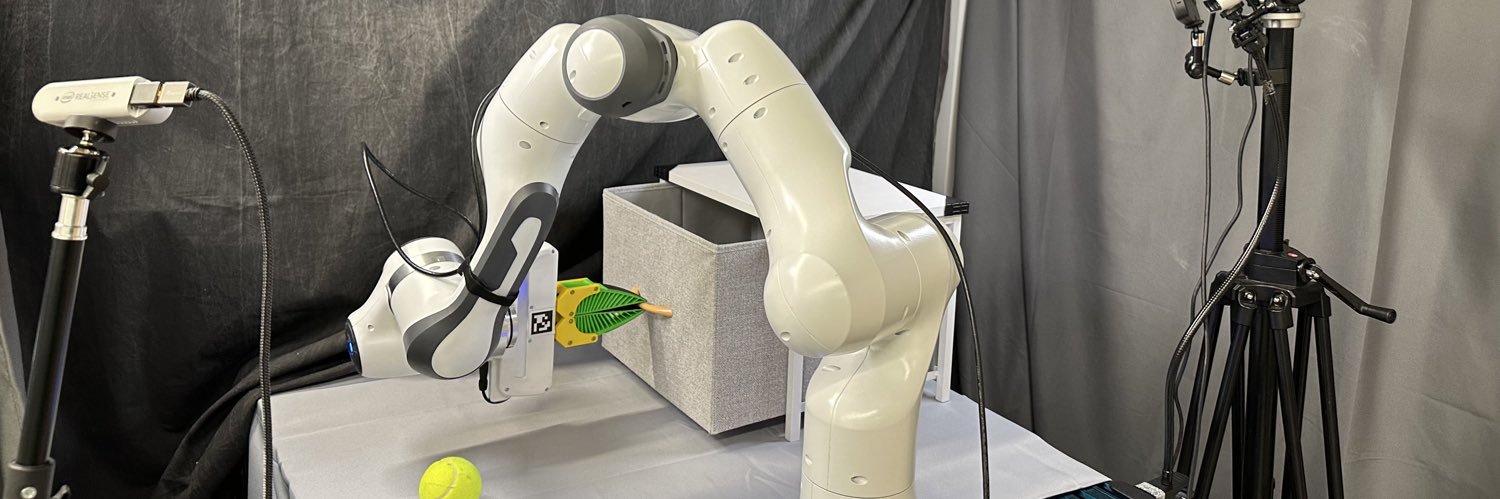
Excited to share our new robot learning sim benchmark RoboMME with a wide range of non-Markovian tasks specifically designed to evaluate different forms of memory for manipulation policies!
https://t.co/aJ5UzwsJhA
Robot memory methods are growing fast, but systematic evaluation is largely lacking. 📉
Introducing RoboMME: a new benchmark for memory-augmented robotic manipulation! 🤖🧠
Featuring 16 tasks across temporal, spatial, object, and procedural memory
🔗 https://t.co/4ELtnhDwrt
high fidelity tactile simulation with shear(!!) to train sim-to-real RL policies
years ago I was less bullish on tactile simulation so we doubled down on SSL with just real data to build Sparsh models
now we can revist co-training on sim + real data
Has visual fidelity outpaced dynamic fidelity in tactile simulation for sim-to-real transfer of policies?
Introducing HydroShear 🏄♂️ : a hydroelastic tactile shear simulation for training zero-shot sim-to-real tactile policies in contact-rich tasks where fingertip force and shear matter most!
Webpage: https://t.co/sNRtJIZjy7
Robot videos in 1x 🧵👇
T-5 to CoRL'25! 🇰🇷🤖
Join us on Sep 27th for the 1st Human to Robot (H2R) workshop, where we discuss the future of sensorizing, modeling, and (robot) learning from humans.
https://t.co/aCJ0PMmSZ8
Thanks @_akhaliq for posting our work! And I'm happy to share that AimBot 🎯 is accepted to CoRL 2025 @corl_conf! See you in Seoul!
Project webpage: https://t.co/9YR9ialqNw
Thanks to my amazing co-lead @YinpeiD, co-authors, and our advisors @NimaFazeli7, @SLED_AI