We’re releasing OmniReset, a framework for training robot policies using large-scale RL and diverse resets for contact-rich, dexterous manipulation.
OmniReset pushes the frontier of robustness and dexterity, without any reward engineering or demonstrations.
Try the policies yourself in our interactive simulator! https://t.co/3hW3nYx2vD
(1/N 🧵)
Something current Large Vision Language Models can’t do: trace cables, the first step for a broad range of robot tasks in homes, factories, construction sites, transportation, and healthcare. Introducing our #CoRL2023 (oral) paper, HANDLOOM (https://t.co/RFKxM91WmE). (1/7)
Check out our recent paper on automatically tracing complicated cable configurations from overhead images!
Bonus: Click into the thread from @vainavi_v to find out how GPT-4V does at this 😛
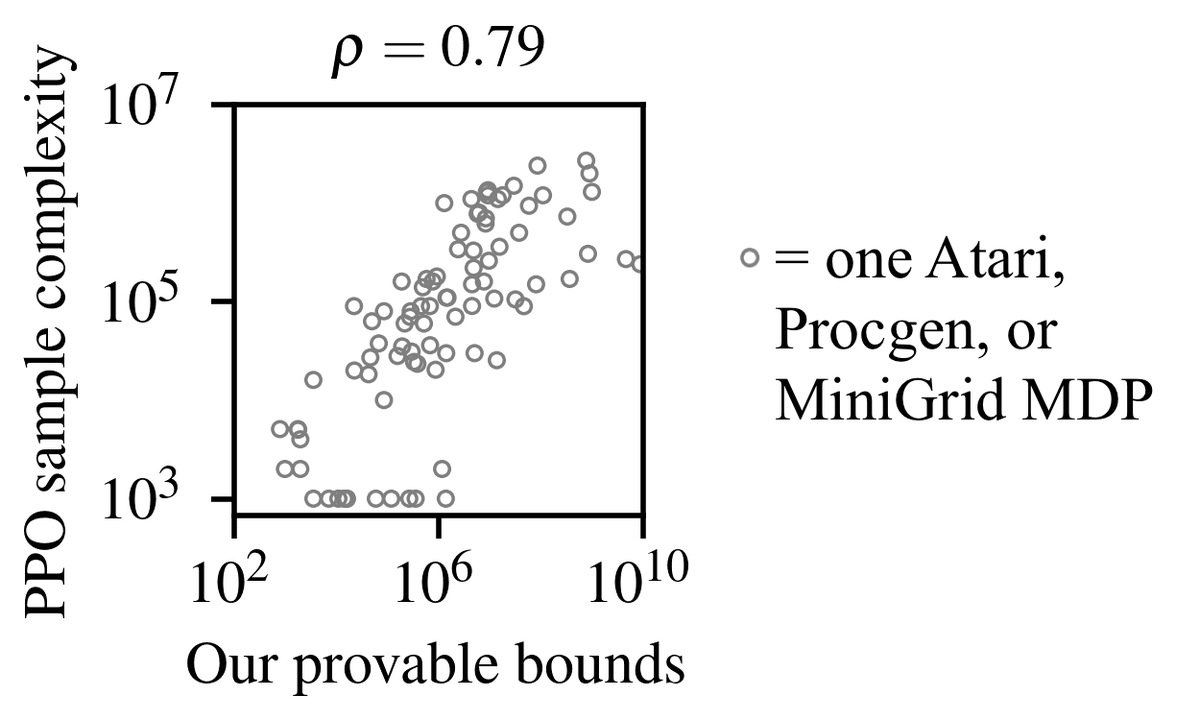
Excited to present our new paper on bridging the theory-practice gap in RL! For the first time, we give *provable* sample complexity bounds that closely align with *real deep RL algorithms'* performance in complex environments like Atari and Procgen.
When building robotic systems, we create policies to make progress on our task. But what if we encounter states where attempting progress is challenging or risky? In our #ICRA2023 paper, we shape behavior in difficult parts of the state space for the task of untangling cables.
Wouldn’t it be nice if ChatGPT could find your missing keys for you? Our latest research from @berkeley_ai + @GoogleAI suggests that robots can use large language models (LLMs) to find hidden objects faster. 🧵👇
Does anyone enjoy folding laundry? Robots are often too slow; We’re presenting a paper @IROS2022 on how to speed up folding by an order of magnitude.
SpeedFolding uses novel perception and action primitives to fold 30-40 garments per hour.
(1/8)
When is your robot ready to switch from Sim to Real? We explore metrics for this in the context of a specific task. #CASE2022 from @AUTOLab_Cal@berkeley_ai, with paper, code, and video at https://t.co/Rd6rgdZAKp (1/8)
About to present “Automated Pruning of Polyculture Plants” at #CASE 2022 Best Paper session. By M Presten, R Parikh, S Aeron, S Mukherjee, S Adebola, S Sharma, Mark Theis, W Teitelbaum: @AUTOLab_Cal https://t.co/D4hUbzeqW2
What’s the future of food? Polyculture farming is more sustainable than monoculture, but requires more labor. Could robots help? New results w/ AlphaGarden using “Real2Sim2Real” learning from @AUTOLab_Cal@UCBerkeley. Data, paper, and presentation: https://t.co/Kjh1Zjn5mG (1/9)
It’s notoriously difficult to model the mechanics of compliant robot jaw tips during grasping! We found that a new tool from computer graphics can help. IPC-GraspSim, from @AUTOLab_Cal@UCBerkeley. Paper, data, video: https://t.co/3U3nT3FKFz (1/9)