For those who are in need of experience with InEKF & Legged state estimation, check this post.
I’ve explored quite a lot of Invariant EKF and its variants, but the example repo mentioned in this post (legged ros package) shows how a good legged odometry should work. 👍
I got tired of people complaining that IsaacLab is hard to install. here’s a single makefile to install everything and set it up. conda or uv. go wild:
https://t.co/hMaCbXGAOx
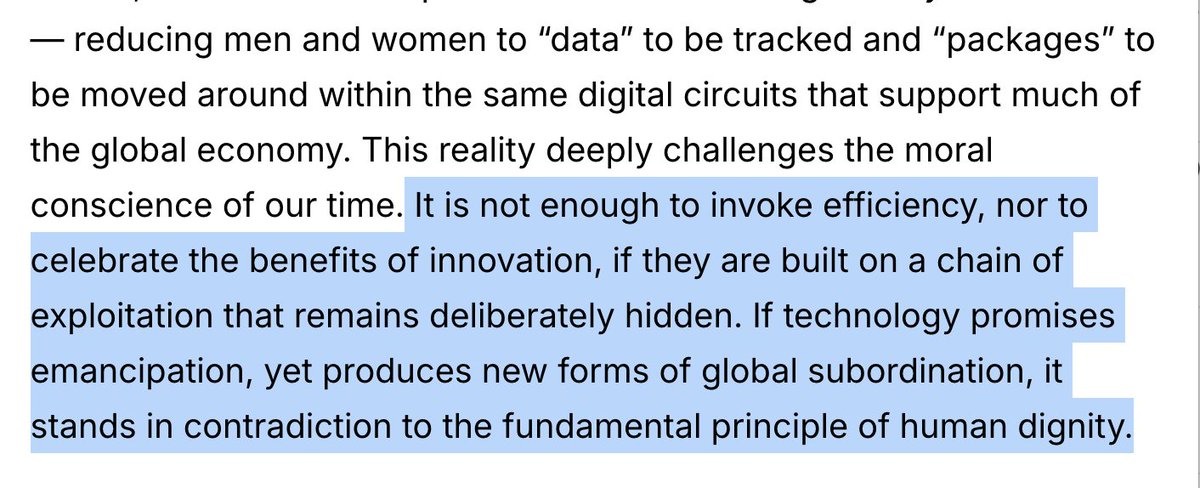
“In practice, however, technology is never neutral, because it takes on the characteristics of those who devise it, finance it, regulate it and use it.”
THANK YOU POPE LEO FOR SAYING THIS.
Time for the “technology is a tool with no inherent moral position” idea to die!
ok I kind of blindly retweeted this last time (I see a neat project using maniskill I usually retweet), but spent a little time looking through this project more
Incredibly well documented, gifs of every task, RLDS/open-x dataset format support (which I never got around to doing in maniskill natively), some nice benchmarking ideas around memory with categorization, and somehow dense rewards and/or motion planning scripts for 90 something tasks
Attention @arxiv authors: Our Code of Conduct states that by signing your name as an author of a paper, each author takes full responsibility for all its contents, irrespective of how the contents were generated. 1/
The community didn't wait for us.
Before we even released code for fine-tuning, training, and inference, builders were already deploying MolmoAct2 in the wild. So we're shipping faster.
Today: official LeRobot integration for MolmoAct2.
Train, evaluate, and deploy with standard LeRobot datasets and workflows — bring your own task, bring your own embodiment.
→ https://t.co/LTfAszlH7S
Can't wait to see what you build.
Atrocious take, and I understand now why some of the old school RL people refuse to interact with LLM people.
"Who cares about the theory and the entire underlying body of work, just do the one simple instantiation that I use, nothing else is important."
If Caffe, TensorFlow, or PyTorch had been closed to only a few; if the Transformer was never published; if ResNet had stayed inside MSR; or if ImageNet and Common Crawl had never been made available, we would not have the ChatGPT moment we see today.
Openness is not just a choice. It is a responsibility.
We are excited that MolmoAct 2 from @allen_ai can contribute, even in a small way, toward bringing the robotics community closer to its own ChatGPT moment.
Thanks @stepjamUK for featuring!
@ChongZitaZhang for this kind of extremen behavior for sure, but I would be very surprised if there was any easier platform to do this very hard thing on!