Hacking the Sensors: A playbook for hackers on what sensors are and how to attack them. 🏭🌡️🔦😱💥
More details on:
LinkedIn: https://t.co/R9AKssf0PT
Substack: https://t.co/bpOXo3f0T2
#Czechia/#Canada 🇨🇿🇨🇦:
The Czech fund Tech Horizons, backed by the Czechoslovak Group (CSG, @CSG_HOLDING), is entering the Canadian technology company North Vector Dynamics (NVD) as the first European investor.
NVD develops advanced autonomous air defense systems, precision-guided missiles and hypersonic technologies.
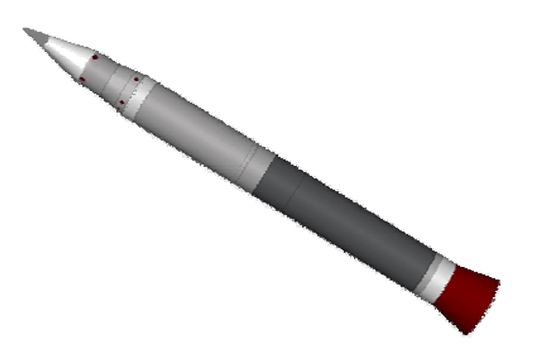
Its flagship product, the CM-70 SPEAR, is designed as a short-range air defense system designed to intercept and neutralize smaller and medium-sized drones - from commercially available and FPV drones to larger tactical UAVs and stand-by munitions such as Shahed or Lancet.
The CM-70 missile is small and fast, designed precisely for the modern battlefield. Weighing just two kilograms, it can fly at 1,000 km/h after launch and is guided to its target by a combination of laser and AI. This allows it to engage fast and agile drones with high precision and at a fraction of the cost of traditional missiles. It can be used from a mobile launcher, from vehicles, UGVs and USVs, as well as from the air.
Moog unveiled a mobile C-UAS/ATGM system based on its Flexible Mission Platform (FMP) during SOF Week 2026. The EchoShield radar can work with the M134 minigun & APKWS to intercept drones, while the MX-10D payload can be paired with Aeon's Zeus missile to engage armored targets.
Moscow-based small satellite developer proposes the "world's first distributed solar observatory" comprised of cubesats spread from Earth's orbit to Lagrange points.
🧵If you want to build your own SDR, whether from a commercial kit or an open source design, here are the projects, kits, and products I recommend.
You can also learn from them for your own design.
1/9
𝐅𝐫𝐨𝐦 𝐓𝐮𝐧𝐧𝐞𝐥𝐬 𝐭𝐨 𝐒𝐚𝐥𝐯𝐨𝐬: 𝐇𝐨𝐰 𝐈𝐫𝐚𝐧’𝐬 𝐌𝐢𝐬𝐬𝐢𝐥𝐞 𝐂𝐢𝐭𝐢𝐞𝐬 𝐆𝐞𝐧𝐞𝐫𝐚𝐭𝐞 𝐅𝐢𝐫𝐞𝐩𝐨𝐰𝐞𝐫
The 2nd article of three, in the series on “𝐈𝐫𝐚𝐧’𝐬 𝐔𝐧𝐝𝐞𝐫𝐠𝐫𝐨𝐮𝐧𝐝 𝐌𝐢𝐬𝐬𝐢𝐥𝐞 𝐂𝐢𝐭𝐢𝐞𝐬” by Kartikeya Sethi, founder of Vel Atomics, examines how Iran’s underground missile complexes translate protected missile stockpiles into usable and repeatable combat power. It argues that the true value of a missile city lies not in simply hiding missiles underground, but in its ability to generate successive waves of fire through a disciplined cycle of preparation, launch, displacement, and reconstitution. The article explains that missile operations begin well before launch, with warning, timing, concealment, emissions control, and careful management of observable signatures to complicate enemy targeting.
It outlines several launch methods, including road-mobile transporter-erector-launchers emerging from tunnels, launches from hardened shafts, and portal-based firing from mountainsides or concealed slopes. Across all methods, the common aim is to minimise the time between exposure and firing so that launchers can survive and be reused for later salvos.
A major focus of the article is logistics. It stresses that missile inventories alone are insufficient without functioning launchers, maintenance areas, fueling and checkout zones, power supply, ventilation, secure command and control, and spare-parts support. Surface infrastructure such as roads, ramps, portal entrances, and support buildings is described as especially vulnerable, making these visible nodes important targets despite the depth of the underground system.
The article also highlights industrial resilience, arguing that endurance under attack depends on dispersed production, protected facilities, repair capacity, and replacement of critical components. Overall, it presents missile cities as dynamic systems whose survivability depends on operational tempo, sustainment, and production resilience rather than underground protection alone.
To follow:
Part 3 – Deception, Defence, and Vulnerabilities: Iran’s Missile Cities in Context
#missilewarfare #missilecities #ballisticmissiles
#missiles #missilelauncher #tunnelwarfare #@Iranwar
https://t.co/EUjgcrCMhT
We use all kinds of smart devices these days, from fridges & coffee makers to fitness trackers and ATMs.
And in this handbook, @sohamstars teaches you all about the software that powers them.
You'll also learn how the hardware works, how to manage memory and power, how to handle timing and communication, & more.
https://t.co/obXXtQAWMB
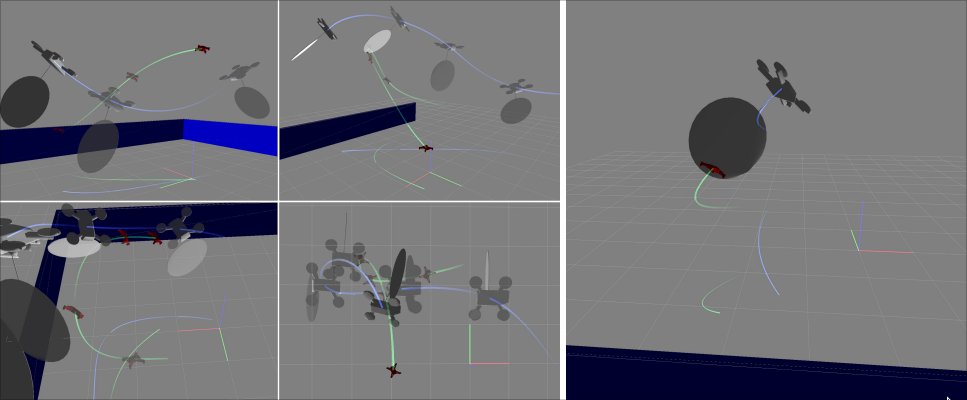
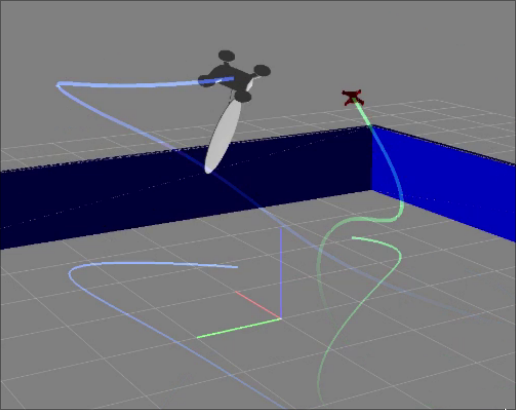
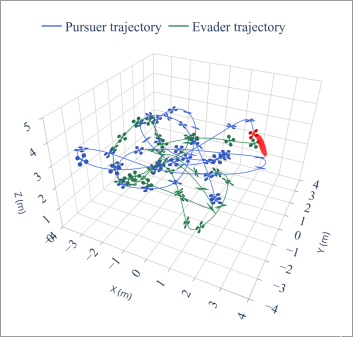
🚨 Adversarial RL for Drone Interceptors:
Competitive RL is being used to train drone interceptors against agile evasive drones
But instead of training only the interceptor (pursuer), this paper trains both sides.
1. The interceptor learns to catch
2. The evader learns to escape
Making autonomy adversarial pushes both policies to its limits. Both agents are trained inside a high-fidelity JAX quadrotor simulator running massive parallel rollouts
Results showed a successful transfer zero-shot to a real indoor flight arena, and caught the simulated evader 7 times in 28 seconds.
Paper: https://t.co/FZw2W7g6Uy
https://t.co/fXy5OvebIS "10,000lbf-class High Bypass Turbofan Engine Development ('25.07-'31.11)" program aims to develop 10,000lbf-class high bypass turbofan engine (KTF10000) for application as propulsion system for low-observable reconnaissance UAV.
🇺🇸 Lockheed Martin (@LockheedMartin) announced a $25 million investment in Lindon, Utah based Fortem Technologies (@FortemTech).
According to Fortem, this investment represents the initial tranche of Fortem’s Series B fundraising round which will enable it to accelerate production at scale and enhance deployment within Lockheed Martin’s Sanctum counter-UAS ecosystem.
Learn more >> https://t.co/wdRIWL0kDS
We implemented @karpathy 's MicroGPT fully on FPGA fabric.
No GPU.
No PyTorch.
No CPU inference loop.
Just a transformer burned into hardware, generating 50,000+ tokens/sec.
The model is small, but the idea is not: inference does not have to live only in software 👇
Princeton's Introduction to Robotics! 🎓
@Princeton University released their full Introduction to Robotics course publicly with lecture videos, notes, slides, and assignments.
This course provides fundamental theoretical and algorithmic principles behind robotic systems with hands-on experience.
Topics covered:
→ Feedback Control (dynamics, PD control, Linear Quadratic Regulator)
→ Motion Planning (discrete planning with BFS/DFS, optimal planning with Dijkstra/A*)
→ State Estimation, Localization, and Mapping (Bayes filtering, Kalman filtering, particle filtering, SLAM)
→ Vision and Learning (optical flow, deep learning, convolutional networks, reinforcement learning), and broader topics including robotics and law, ethics, and economics.
Assignments include theory, programming, and hardware implementation components. The final project has students program drones for vision-based navigation with attached cameras transmitting real-time images.
All lecture videos, notes, slides, and assignments are freely available. Prerequisites include multivariable calculus, linear algebra, basic probability, basic differential equations, and some programming experience in Python.
‼️ GO FOR IT: https://t.co/7KxhWsr6Ok
~~
♻️ Join the weekly robotics newsletter, and never miss any news → https://t.co/GoA3ZuwoPB
Poland tested 7 acoustic drone detection systems at Ustka under Eastern Shield on Apr 22, including Squarehead Technology's Discovair G2+. Passive, RF-silent detection — no drone can be hacked to silence.
https://t.co/CfLpAOR1w4
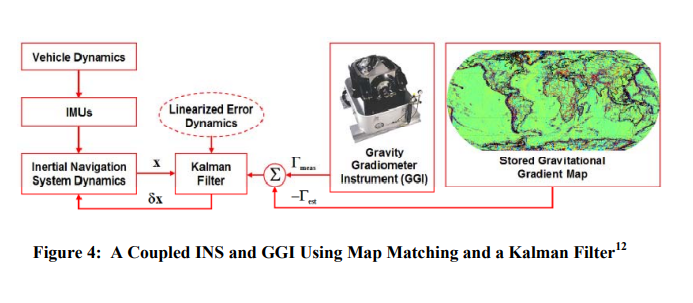
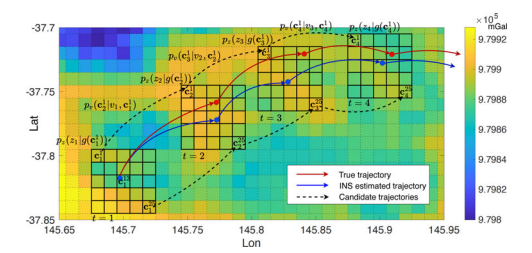
You're flying blind in GNSS-denied airspace, you can't emit RF to avoid detection, how do you navigate to the target?
Your handy Gravity Gradiometer measures the gradient of the gravity vector map-matches that fingerprint to a coordinate in space.
Start learning mobile robotics now! 📚
University of Michigan released a course on autonomous mobile robotics.
It's all for free on YouTube as a series of 29 video lectures covering theory and application of probabilistic and geometric techniques for autonomous mobile robotics.
Topics include Bayesian filtering, stochastic representations of the environment, motion and sensor models for mobile robots, algorithms for mapping and localization, and application to autonomous marine, ground, and aerial vehicles.
Lecture series includes:
→ Bayes Filters and Kalman Filtering
→ Nonlinear Kalman Filtering
→ Particle Filtering
→ Symmetry & Rigid Body Motion
And more covering the fundamentals of mobile robotics perception and navigation.
University courses on mobile robotics typically cost thousands in tuition. UMich-CURLY is releasing the full lecture series for free, democratizing access to robotics knowledge (which I simply LOVE! 🫶🏼)
For anyone wanting to start working in autonomous systems, these fundamentals: Bayesian filtering, localization, mapping, are essential.
Now they're available to anyone with internet access. 🎓
🔗 Start here: https://t.co/v8kgMQSanp
~~
♻️ Join the weekly robotics newsletter, and never miss any news → http://
https://t.co/GoA3ZuwoPB