Researcher in Information Theory for AI and Robotics at the Univ. of Hertfordshire. Love humans, animals, machines + their ability to represent themselves.
Announcing DreamDojo: our open-source, interactive world model that takes robot motor controls and generates the future in pixels. No engine, no meshes, no hand-authored dynamics. It's Simulation 2.0. Time for robotics to take the bitter lesson pill.
Real-world robot learning is bottlenecked by time, wear, safety, and resets. If we want Physical AI to move at pretraining speed, we need a simulator that adapts to pretraining scale with as little human engineering as possible.
Our key insights: (1) human egocentric videos are a scalable source of first-person physics; (2) latent actions make them "robot-readable" across different hardware; (3) real-time inference unlocks live teleop, policy eval, and test-time planning *inside* a dream.
We pre-train on 44K hours of human videos: cheap, abundant, and collected with zero robot-in-the-loop. Humans have already explored the combinatorics: we grasp, pour, fold, assemble, fail, retry—across cluttered scenes, shifting viewpoints, changing light, and hour-long task chains—at a scale no robot fleet could match. The missing piece: these videos have no action labels. So we introduce latent actions: a unified representation inferred directly from videos that captures "what changed between world states" without knowing the underlying hardware. This lets us train on any first-person video as if it came with motor commands attached.
As a result, DreamDojo generalizes zero-shot to objects and environments never seen in any robot training set, because humans saw them first.
Next, we post-train onto each robot to fit its specific hardware. Think of it as separating "how the world looks and behaves" from "how this particular robot actuates." The base model follows the general physical rules, then "snaps onto" the robot's unique mechanics. It's kind of like loading a new character and scene assets into Unreal Engine, but done through gradient descent and generalizes far beyond the post-training dataset.
A world simulator is only useful if it runs fast enough to close the loop. We train a real-time version of DreamDojo that runs at 10 FPS, stable for over a minute of continuous rollout. This unlocks exciting possibilities:
- Live teleoperation *inside* a dream. Connect a VR controller, stream actions into DreamDojo, and teleop a virtual robot in real time. We demo this on Unitree G1 with a PICO headset and one RTX 5090.
- Policy evaluation. You can benchmark a policy checkpoint in DreamDojo instead of the real world. The simulated success rates strongly correlate with real-world results - accurate enough to rank checkpoints without burning a single motor.
- Model-based planning. Sample multiple action proposals → simulate them all in parallel → pick the best future. Gains +17% real-world success out of the box on a fruit packing task.
We open-source everything!! Weights, code, post-training dataset, eval set, and whitepaper with tons of details to reproduce. DreamDojo is based on NVIDIA Cosmos, which is open-weight too.
2026 is the year of World Models for physical AI. We want you to build with us. Happy scaling!
Links in thread:
🧠 Topics include (but not limited to):
Information Bottleneck, compression & sparsity, NN dynamics & stability, statistical physics, generalization, interpretability, transformers, optimization landscapes, self-supervised learning, and more.
#InformationTheory#Physics#Neuro
📣Call for Papers
Special Issue: “Mathematical Understanding of Information Storage, Compression & Prediction in Neural Networks” on Frontiers in Computational Neuroscience / Neuroinformatics.
🗓️Deadline: 15/3/2026
🔗https://t.co/vY80Ttffqx
#DeepLearning#NeuralNetworks#TheoryML
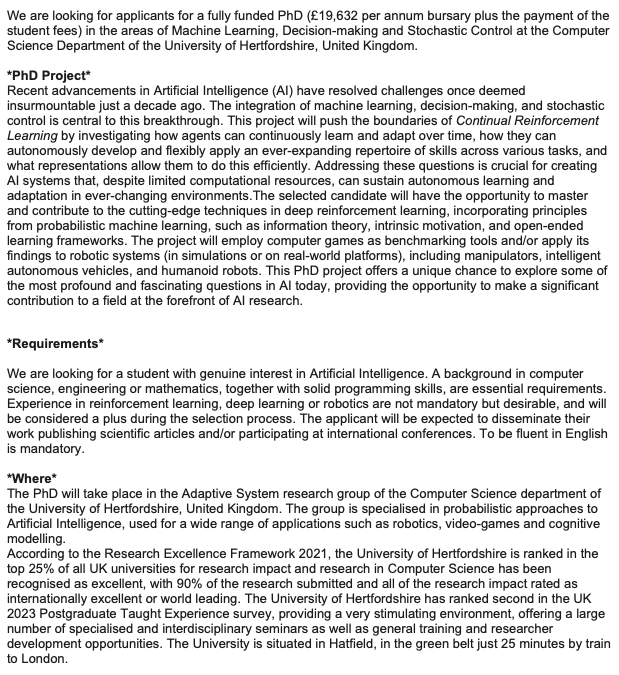
We are looking for applicants for a fully funded #PhD at @UniofHerts on Continual #ReinforcementLearning and Stochastic Control.
Project: https://t.co/syUTEJ4f52
How to apply: https://t.co/AtEMof2ole
Deadline: 1/5/2024
Please help me to distribute
@UHertsResearch@CsHerts
21 videos from Cohort 2 of the Parr et al. Active Inference Textbook:
https://t.co/rmTEctbw9G
Info on book:
https://t.co/dtKrmtgBnK
More info on the Textbook Group: https://t.co/ngG6nTKi0Q
Cohort 4 starting in a few weeks! Please join & share the registration details.
Discover the inside story of ChatGPT in this exclusive conversation with four of the people who helped build what has become the most popular internet app ever. https://t.co/hLyw2CC6Tm
Fully-funded three years Postdoc position in theoretical Neuroscience at at @Unibocconi, Milan, Italy. Deadline: April 17th 2023. Research uses statistical physics, nonlinear dynamics and #MachineLearning on
electrophysiological and connectomic data. Please advertise.
#postdoc
Want to do a fully funded Phd with me (and @creativeEndvs ) on ``Changing the Environment with Intrinsically Motivated Computational Creativity'' at @CsHerts?
https://t.co/3FsCoWDB0H
Deadline to apply: 19th of May, 2023
Sadly, UK residents and citizens only.
Please share.
Latest paper 🧵: Skilled motor control of an inverted pendulum implies low entropy of states but high entropy of actions
@CatenacciVolpi ,Martin Greaves, Dari Trendafilov, me, Giovanni Pezzulo & Daniel Polani
https://t.co/ehZcCeRihb
@UHertsResearch @specsresearchUH
PLOS Computational Biology
“As postulated by perceptual control theory, the mastery of skilled pendulum control is achieving stable control of goals by flexible means”
@CatenacciVolpi @KordingLab @hapiresearch @leafs_s https://t.co/8EI2o3wfHz
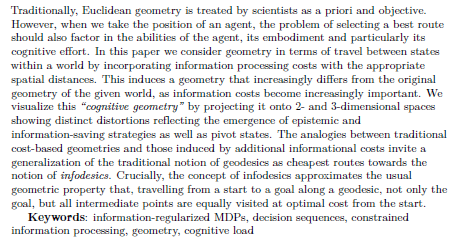
How does an "objective" geometry change when taking into account the abilities, embodiment and cognitive effort of an agent? Really interesting new paper on "cognitive geometries" by @blueshrapnel, @CatenacciVolpi, Franziska Bröker & Daniel Polani: https://t.co/FUORxLtTkw
https://t.co/JeCRZWC99Z
When cognitive effort is taken into account, an easier to follow, but longer route may end up being preferred. This "cognitive geometry" is a reflection of the mental space, and what is "shorter" there is what can be more efficiently mentally organized.
Excited to announce that his Friday, Cross Labs' own Martin Biehl @36zimmer will present: 'If the Universe were a Dynamical System what would an agent be?' via YouTube Live. It's free as always, just register at 👉 https://t.co/IGiY1kNaC3 #AI
Check out this substantial piece of work of my colleagues @blueshrapnel, @CatenacciVolpi, Franziska Broeker and Daniel Polani - introducing the concept of #cognitiveGeometry.
A space of goals: the cognitive geometry of informationally bounded agents
https://t.co/aLYCff39R0
An open source implementation of Variational Empowerment (Mohamed & Rezende, 2015) can be found here: https://t.co/zhaiX0g6tf
thanks to Aidan Rocke and @ildefons
May be of interest to @ChristophSalge@creativeEndvs@CatenacciVolpi
To which extent agents can address a problem while keeping other options available, ready to do something else?To measure this on #IEEE TCDS we introduced the new concept goal-directed empowerment
https://t.co/RNXb3J7S8p
#InformationTheory#ArtificialIntelligence#AI#Cognition